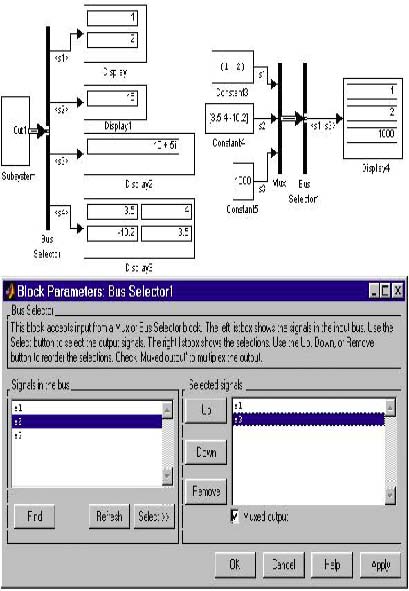
С помощью кнопок Up и Down можно изменить порядок расположения сигналов в шине, перемещая их в окне Selected signals вверх или вниз, соответственно.
Установка параметра Muxed output позволяет объединить сигналы в шину.
На рисунке 9.7.5 показаны примеры использования блока Bus Selector и окно его параметров.
Блок селектора Selector
Назначение: Выбирает из вектора или матрицы требуемые элементы. Параметры: Input Type – Тип входного сигнала. Выбирается из списка: vector – Вектор. matrix – Матрица. Список параметров блока измен...
Блок селектора Selector 2Блок выбирает во входном векторе или матрице и передает на выход только те сигналы, которые определены в параметрах блока или заданы внешним входным сигналом. На рисунке 9.7.6 приведены примеры ис...
Блок присвоения новых значений элементам массива AssignmentНазначение: Заменяет элементы вектора или матрицы. Параметры: Input Type – Тип входного сигнала. Выбирается из списка: vector – Вектор. matrix – Матрица. Список параметров блока изменяется в завис...
Блок объединения сигналов MergeНазначение: Блок выполняет объединение входных сигналов в единый векторный сигнал. Параметры: Number of inputs – Количество входов. Initial output – Начальное значение выходного сигнала. Если этот...
Блок объединения сигналов Merge 2Блок передает на выход значение сигнала вычисленное последним. С помощью параметра Input port offsets можно регулировать расположение входных сигналов в результирующем векторе. Размерность выходно...
Блок объединения сигналов в матрицу Matrix ConcatenationНазначение: Блок выполняет объединение (конкатенацию) входных векторов или матриц. Параметры: Number of inputs – Количество входов. Concatenation method – Способ объединения. Выбирается из списка:...
Блок передачи сигнала GotoНазначение: Блок выполняет передачу сигнала к блоку From. Параметры: Tag – Идентификатор сигнала. Tag visibility – Признаквидимости. Выбирается из списка: local – Сигнал передается в пределах лока...
Блок передачи сигнала Goto 2Использование блока Goto совместно с блоком From обеспечивает передачу сигнала без линии связи. Для передачи могут использоваться сигналы любого типа. В зависимости от выбранного параметра Tag vis...
Блок приема сигнала FromНазначение: Блок выполняет прием сигнала от блока Goto. Параметры: Goto tag – Идентификатор принимаемого сигнала. Должен совпадать с идентификатором указанным в соответствующем блоке Goto. Использ...
Блок признака видимости сигнала Goto Tag VisibilityНазначение: Блок отображает признак видимости сигнала передаваемого блоком Goto. Параметры: Goto tag – Идентификатор сигнала передаваемого блоком Goto. Блок необходимо включать в состав модели или...
Блок создания общей области памяти Data Store MemoryНазначение: Блок создает поименованную область памяти для хранения данных. Параметры: Data store паmе – Имя области памяти. Initial value — Начальное значение. Interpret vector parameters as 1-D (...
Блок записи данных в общую область памяти Data Store WriteНазначение: Блок записывает данные в поименованную область памяти. Параметры: Data store паmе – Имя области памяти. Sample time – Шаг модельного времени. Операция записи выполняется для значения с...
Блок считывания данных из общей области памяти Data Store ReadНазначение: Блок считывает данные из поименованной области памяти. Параметры: Data store паmе – Имя области памяти. Sample time – Шаг модельного времени. Операция считывания выполняется на каждом...
Блок преобразования типа сигнала Data Type ConversionНазначение: Блок преобразует тип входного сигнала. Параметры: Data type – Тип данных выходного сигнала. Может принимать значения (выбираются из списка): auto, double, single, int8, int16, int32, u...
Блок преобразования размерности сигнала ReshapeНазначение: Блок изменяет размерность векторного или матричного сигнала. Параметры: Output dimensionality – Вид размерности выходного сигнала. Выбирается из списка: 1-D array – Одномерный массив (...
Блок определения размерности сигнала WidthНазначение: Вычисляет размерность входного сигнала. Параметры: Нет. Входным сигналом блока может быть действительный или комплексный сигнал любого типа. Выходной сигнал блока имеет тип double. При...
Блок определения момента пересечения порогового значения Hit CrossingНазначение: Определяет момент времени, когда входной сигнал пересекает заданное пороговое значение. Параметры: Hit crossing offset – Порог. Значение, пересечение которого входным сигналом требуетс...
Блок установки начального значения сигнала ICНазначение: Задает начальное значение сигнала. Параметры: Initial value – Начальное значение. Выходной сигнал блока IC равен значению параметра Initial value на первом шаге расчета вне зависимости...
Блок проверки сигнала Signal SpecificationНазначение: Выполняет проверку сигнала на соответствие заданным для сигнала параметрам. Параметры: Dimension -Размерность сигнала. Задается скаляром, если входной сигнал векторный или матрицей вид...
Датчик свойств сигнала ProbeНазначение: Блок позволяет получить численные значения параметров сигнала. Параметры: Probe width (флажок) – Определение числа элементов в векторном или матричном сигнале. Probe Sample time (флажо...
Блок, задающий количество итераций Function-Call GeneratorНазначение: Блок позволяет задать количество итераций на каждом шаге модельного времени для управляемой подсистемы. Параметры: Sample time – Шаг модельного времени. Number of iterations – Количест...
Информационный блок Model InfoНазначение: Блок отображает информацию о модели. Параметры: Model properties – Свойства модели: Created – Дата и время создания модели. Creator – Данные об авторе Modified by – Данные о пользовате...
Блок задания функции FcnНазначение: Задает выражение в стиле языка программирования C . Expression – Выражение, используемое блоком для вычисления выходного сигнала на основании входного. Это выражение составляется по пр...
Блок задания функции Fcn 2В выражении можно использовать следующие компоненты: Входной сигнал. Входной сигнал в выражении обозначается u, если он является скаляром. Если входной сигнал – вектор, необходимо указывать номер...
Блок задания функции MATLAB FcnНазначение: Задает выражение в стиле языка программирования MATLAB. Параметры: MATLAB function – Выражение на языке MATLAB. Output dimensions – Размерность выходного сигнала. Значение параметра –1...
Блок задания функции MATLAB Fcn 2Output signal type – Тип выходного сигнала. Выбирается из списка: real – Действительный сигнал. complex – Комплексный сигнал. auto – Автоматическое определение типа сигнала. Collapse 2-D results t...
Блок задания степенного многочлена PolynomialНазначение: Задает степенной многочлен. Параметры: Polynomial coefficients – Вектор коэффициентов полинома. Коэффициенты расположены в векторе по убыванию степени независимой переменной. Например,...
Блок одномерной таблицы Look-Up TableНазначение: Задает в табличной форме функцию одной переменной. Параметры: Vector of input values – Вектор значений входного сигнала. Может быть задан в виде дискретных значений (например, [1 2 7 9...
Блок двумерной таблицы Look-Up Table(2D)Назначение: Задает в табличной форме функцию двух переменных. Параметры: Row – Строка. Вектор значений первого аргумента. Задается аналогично параметру Vector of input values одномсерной таблицы....
Блок двумерной таблицы Look-Up Table(2D) 2Пример использования блока Look-Up Table(2D) показан на рисунке 9.8.5. Параметры блока заданы в соответствии с таблицей из этого пункта....
Блок многомерной таблицы Look-Up Table (n-D)Назначение: Задает в табличной форме функцию многих переменных. Параметры: Number of table dimensions – Количество размерностей таблицы (аргументов функции). Значение параметра выбирается из списк...
Блок таблицы с прямым доступом Direct Loop-Up Table (n-D)Назначение: Задает многомерную таблицу с прямым доступом к ее элементам. Индексация элементов начинается с нуля. Параметры: Number of table dimensions – Количество размерностей таблицы (аргументов...
Блок таблицы с прямым доступом Direct Loop-Up Table (n-D) 2Примеры использования блока Look-Up Table (n-D) для задания функции двух аргументов показаны на рисунке 9.8.7. В первом случае таблица значений функции ([10 20 30;40 50 60;70 80 90]) задана в пара...
Блок работы с индексами PreLook-Up Index SearchНазначение: Вычисляет значение индекса и относительную величину входного сигнала. Используется совместно с блоком Interpolation (n-D) using PreLook-Up. Параметры: Breakpoint data – Вектор узловых...
Блок интерполяции табличной функции Interpolation (n-D) using PreLook-UpНазначение: Вычисляет значение табличной функции по значению индекса и относительной величине входного сигнала. Используется совместно с блоками PreLook-Up Index Search. Параметры: Number of table...
Subsystem – подсистемыПодсистема это фрагмент Simulink-модели, оформленный в виде отдельного блока. Использование подсистем при составлении модели имеет следующие положительные стороны: Уменьшает количество одновременн...
Subsystem – подсистемы 2Рисунок 9.9.1 иллюстрирует процесс создания подсистемы вторым способом. На рисунке 9.9.2 показан результат этого процесса. В примере использована модель управляемого функционального генератора....
Subsystem – подсистемы 3Виртуальная и монолитная подсистемы Subsystem и Atomic Subsystem
Доступ к окну параметров подсистемы осуществляется через меню Edit командой Block Parameters… Параметры: Show port labels – Показать метки портов. Treat as atomic unit (флажок) – Считать подсистем...
Управляемая уровнем сигнала подсистема Enabled SubsystemПодсистема Enabled Subsystem (в дальнейшем Eподсистема) активизируется при наличии положительного сигнала на управляющем входе. Если входной сигнал векторный, то подсистема активизируется, если хо...
Управляемая уровнем сигнала подсистема Enabled Subsystem 2Пример на рисунке 9.9.4 отличается от предыдущего настройкой блока Enable подсистемы. В данном примере параметр States when enabling блока Enable имеет значение reset. На временных диаграммах видн...
Управляемая фронтом сигнала подсистема Triggered SubsystemПодсистема Triggered Subsystem (в дальнейшем Tподсистема) включается фронтом (перепадом уровня) управляющего сигнала и выполняет вычисления только на том шаге моделирования, где произошло это изме...
Управляемая уровнем и фронтом сигнала подсистема Enabled and Triggered SubsystemПодсистема Enabled and Triggered Subsystem (в дальнейшем ET-подсистема) включается фронтом сигнала поступающего на Tвход системы при наличии положительного сигнала на E-входе системы. Так же как и...
Управляемая S-функцией подсистема Function-call subsystemFunction-call subsystem (в дальнейшем FC-подсистема) является T-подсистемой, предназначенной для использования совместно с S-функцией написанной на языке C. Используя специальные средства, можно о...
Блок условного оператора IfНазначение: Обеспечивает формирование управляющих сигналов для подсистем If Action Subsystem. Блок является аналогом оператора if-else языка программирования C. Параметры: Number of inputs – Колич...
Блок условного оператора If 2На рисунке 9.9.7 показан пример использования блока If совместно с подсистемами If Action Subsystem. В примере первая подсистема пропускает через себя входной сигнал если входной сигал блока If бо...
Блок переключателя Switch CaseНазначение: Обеспечивает формирование управляющих сигналов для подсистем Case Action Subsystem. Блок является аналогом оператора Switch языка программирования C. Параметры: Case conditions – Списо...
Управляемая по условию подсистема Action SubsystemПодсистема предназначена для работы под управлением блоков If или Switch Case. В первом случае она называется If Action Subsystem, а во втором Switch Case Action Subsystem. Параметры подсистемы оп...
Управляемая подсистема For Iterator SubsystemУправляемая подсистема For Iterator Subsystem представляет собой подсистему, которая выполняется неоднократно в течение одного такта моделирования. Количество повторений должно быть известно заран...
Управляемая подсистема While Iterator SubsystemУправляемая подсистема While Iterator Subsystem представляет собой подсистему, которая выполняется неоднократно в течение одного такта моделирования. Количество повторений заранее не известно. Цик...
Управляемая подсистема While Iterator Subsystem 2Параметры: Maximum number of iterations – Максимальное количество итераций. Если значение параметра равно -1 (минус один), то количество итераций не ограничивается. While loop type (флажок) – Тип...
Конфигурируемая подсистема Configurable SubsystemБлок Configurable Subsystem позволяет создавать подсистему, обеспечивающую выбор конфигурации этой подсистемы. Например, в систему управления каким-либо объектом можно поставить конфигурируемую по...
Конфигурируемая подсистема Configurable Subsystem 2Поместить в окно модели блок Configurable Subsystem из только что созданной библиотеки. С помощью команды контекстного меню (вызывается нажатием правой клавиши мыши на объекте) Block choice (вариа...
Конфигурируемая подсистема Configurable Subsystem 3Пример модели, использующей конфигурируемую подсистему, и библиотека конфигурируемой подсистемы показаны на рисунке 9.9.12. В примере конфигурируемая подсистема состоит из апериодического и колеба...
Маскирование подсистемМеханизм маскирования подсистем позволяет оформить подсистему как полноценный библиотечный блок, т.е. снабдить подсистему собственным окном параметров, пиктограммой, справочной системой и т.п. Мас...
Создание окна параметровОкно параметров создается с помощью вкладки Initialization (Инициализация) редактора маски. Для создания поля ввода параметра с его описанием необходимо выполнить следующие действия: Нажать кнопку...
Создание окна параметров 2Выбрать формат параметра из списка Assiggment: Evaluate – Вычисляемый. Выбирается, если параметр должен иметь числовое значение. В данное поле можно будет ввести выражение в соответствии с правила...
Создание окна параметров 3Модель генератора обладает следующими возможностями: Значения амплитуды и частоты сигнала могут задаваться либо как параметры генератора в его окне диалога, либо от внешних источников через входны...
Создание окна параметров 4Название параметра, идентификатор связанной с ним переменной, тип элемента интерфейса и формат параметра приведены в ниже лежащей таблице. Prompt Variable Control Type Assiggment Назначение Intern...
Создание окна параметров 5Выбор формы выходного сигнала выполняется также с помощью блока Selector. Треугольный, прямоугольный и синусоидальный сигналы объединяются в вектор с помощью блока Mux, а затем в зависимости от чи...
Создание пиктограммы подсистемыПиктограмма подсистемы создается с помощью вкладки Icon (Пиктограмма) редактора маски. Окно редактора маски с открытой вкладкой Icon показано на рисунке 9.10.5. Вкладка содержит следующие элементы...
Создание пиктограммы подсистемы 2Icon transparency -Список позволяющий установить прозрачность пиктограммы: Opaque – Пиктограмма не прозрачна. Transparent– Пиктограмма прозрачна. Icon rotation -Список позволяющий задать возможнос...
Создание пиктограммы подсистемы 3Примеры маскированных подсистем с различными вариантами текстовых надписей даны на рисунке 9.10.6. Значения текстовых переменных заданы на вкладке Initialization в графе Initialization commands....
Команды построения графиковДля построения графиков на пиктограмме могут использоваться следующие команды: plot(Y) – В том случае, если Y является вектором, то строится график по оси абсцисс которого откладывается значение и...
Команды отображения передаточных функцийДля отображения на пиктограмме передаточной функции используются следующие команды: dpoly(num, den) – Отображение дробно-рациональной передаточной функции (num – вектор коэффициентов числителя, de...
Команды отображения рисунка из графического файлаДля отображения на пиктограмме рисуннка из графического файла используются следующие команды: image(imread('filename')) – Отображение рисунка из файла с полным именем filename. Для правильной рабо...
Использование редактора пиктограмм iconeditДля создания пиктограмм можно также использовать редактор пиктограмм iconedit. Для его вызова используется команда: iconedit('modelname','Subsystem'), где modelname – имя файла модели (без расшире...
Создание автоматически обновляемых пиктограммСоздание автоматически обновляемой пиктограммы рассмотрим на примере функционального генератора (рисунок 9.10.2). Генератор может вырабатывать сигнал трех видов: треугольный, прямоугольный и синус...
Создание автоматически обновляемых пиктограмм 2Реализация поставленной задачи обеспечивается указанными ниже командами, которые необходимо ввести в графе Initialization commands редактора маски: switch Wave_form case 1 % треугольный сигнал x=[...
Создание справки маскированной подсистемыДля создания описания и справки маскированной подсистемы служит вкладка Documentation (Документация). Вкладка Documentation содержит две графы: Block description (Описание блока) и Block Help (Спр...
Создание справки маскированной подсистемы 2Для правильной работы справочной системы необходимо, чтобы файл справки находился в той же папке, что и файл модели, и данная папка являлась рабочей. Допускается также вместе с именем файла указыв...
Создание динамически обновляемых окон диалогаДинамически обновляемое окно диалога это такое окно, внешний вид которого изменяется в зависимости от значения параметров заданных в самом окне. Например, для рассматриваемого в данной главе функц...
Создание динамически обновляемых окон диалога 2Разработать функции обработки. Для рассматриваемого примера функция call_back_freq (файл call_back_freq.m) выглядит следующим образом: Freq_param=get_param(gcb,'Internal_freq'); % Присвоение перем...
Создание динамически обновляемых окон диалога 3Для правильной работы такого окна диалога необходимо чтобы файл модели и файлы функций обработки находились в одной папке, и данная папка являлась рабочей. Согласно документации по Simulink текст...
Управление портами маскированной подсистемыВ предыдущем параграфе рассматривалась методика создания динамически обновляемых окон диалога. В приведенном примере задание на амплитуду или частоту генератора сигналов может задаваться как парам...
Управление портами маскированной подсистемы 2На рисунке 9.10.16 приведена модель генератора для случая, когда источник задания на амплитуду сигнала является внутренним, а источник задания на частоту – внешним. На рисунке видно, что при выбор...
Редактор дифференциальных уравнений DEESimulink содержит специальный блок – Differential Equation Editor (редактор дифференциальных уравнений). С помощью этого блока можно задавать системы дифференциальных уравнений в явной форме Коши...
Редактор дифференциальных уравнений DEE 2Предварительно составляем систему дифференциальных уравнений, описывающую электрическую цепь: di e = L + R i + udt c duci = C dt где i – ток в цепи, uc -напряжение на конденсаторе. Записываем данн...
Редактор дифференциальных уравнений DEE 3Достоинством редактора DEE является также то, коэффициенты дифференциального уравнения могут быть переменными и задаваться также как и входные сигналы (через входной порт). В качестве примера на р...
Использование Simulink LTI-ViewerДля анализа динамических систем Инструмент Simulink LTI-Viewer входит в состав пакета прикладных программ Control System Toolbox и предназначен для анализа линейных стационарных систем. С помощью...
Использование Simulink LTI-Viewer 2В открывшемся окне можно выбрать число отображаемых графиков (панель Select a response plot configuration) и вид отображаемых графиков (панель Response type)....
Использование Simulink LTI-Viewer 3Для построения доступны следующие графики (диаграммы): step – Реакция на единичное ступенчатое воздействие. impulse – Реакция на единичное импульсное воздействие. bode – Логарифмические амплитудна...
Использование Simulink LTI-Viewer 4Настройку внешнего вида графиков можно выполнить с помощью команды Edit\Line Styles… (установка вида и цвета линий, вида маркеров)....
Настройка Simulink LTI-ViewerС помощью команды Edit\Viewer Preferences… выполняются следующие виды настройки: Установка единиц измерения (вкладка Units). Вид окна при настройке единиц измерения показан на рисунке 11.6. Вкладк...
Настройка Simulink LTI-Viewer 2Внешний вид вкладки Style показан на рисунке 11.7. Установка параметров расчета переходного процесса (вкладка Characteristics)....
Настройка Simulink LTI-Viewer 3Данная вкладка позволяет задать параметры установленные по умолчанию для вычисления времени нарастания и времени переходного процесса. По умолчанию Simulink LTI-Viewer вычисляет время переходного...
Настройка Simulink LTI-Viewer 4Установка интервалов времени и частоты (вкладка Parameters). На данной вкладке задается временной интервал для расчета переходного процесса (панель Time Vector), а также интервал частот для расчет...
Экспорт моделиКоманда File/Export позволяет выполнить экспорт модели в виде матриц уравнений пространства состояния в рабочую область MATLAB или в файл. При выполнении этой команды открывается окно диалога (смо...
Экспорт модели 2В командном окне появится распечатка значений матриц: EX_S_LTI_V_1 % Ввод с клавиатуры (символы не вводятся) Для работы с матрицами удобно извлечь их из структуры командами вида: A = имя_структуры...
Основные команды MATLAB для управления Simulink-модельюПри разработке графического интерфейса пользователя, создании S-функций и т.п. задач требующих управления конфигурацией, параметрами и работой Simulink-модели допускается использовать специальные...
Команда add_blockНазначение: Добавление нового блока в модель Синтаксис: add_block('src', 'dest') Команда добавляет блок, полный путь которого задан параметром 'src', в модель в соответствии с путем назначения 'de...
Команда add_lineНазначение: Добавление новой линии связи в модель Синтаксис: h = add_line('sys','oport','iport') Команда добавляет новую линию связи в модели sys от выходного порта oport ко входному порту iport....
Команда add_paramНазначение: Добавление нового параметра в модель. Синтаксис: Команда add_param('sys', ,value1, ,value2,...) добавляет в модель sys новые параметры parameter1, parameter2…и присваивает им значения...
Команда bdcloseНазначение: Команда закрывает Simulink-модель (все модели) без сохранения изменений. Синтаксис: bdclose Команда закрывает активную модель. bdclose('sys') Команда закрывает модель sys. bdclose('all...
Команда bdrootНазначение: Возвращает имя модели (подсистемы верхнего уровня). Синтаксис: bdroot Команда возвращает имя активной модели. bdroot('obj') Команда возвращает имя модели содержащей объект obj. Пример....
Команда close_systemНазначение: Команда закрывает модель с возможностью сохранения изменений. Синтаксис: close_system Команда закрывает модель или подсистему. Если модель или подсистема были изменены, то на экран буд...
Команда delete_blockНазначение: Удаление блока из модели. Синтаксис: delete_block('blk') Команда удаляет блок в соответствии с параметром blk, задающим полный путь к блоку. Пример 1: Команда delete_block('EX_delete_b...
Команда delete_lineНазначение: Удаление линии связи Синтаксис: delete_line('sys', 'oport', 'iport') Команда удаляет линию связи в модели sys от выходного порта oport ко входному порту iport. Параметры oport и iport...
Команда delete_paramНазначение: Удаление параметра модели, добавленного командой add_param . Синтаксис: delete_param('sys','parameter1','parameter2',...) Команда удаляет из модели sys параметры parameter1, parameter2...
Команда gcbНазначение: Получение пути текущего блока. Синтаксис: gcb Команда возвращает полный путь текущего блока. gcb('sys') Команда возвращает полный путь текущего блока в модели sys. Под текущим блоком п...
Команда find_systemНазначение: Поиск моделей (подсистем), блоков, линий, портов и текстовых описаний. Синтаксис: find_system (sys, 'c1', cv1, 'c2', cv2,...'p1', v1, 'p2', v2,...) Команда выполняет поиск моделей (под...
Команда find_system 2В таблице значения используемых “по умолчанию” параметров приведены в фигурных скобках. Пример 1. Команда find_system возвращает массив ячеек содержащих имена всех открытых подсистем и блоков. При...
Команда find_system 3обычным текстовым символом. Например, шаблон '\\' соответствует строке содержащей символ '\'. [ ] Определяет набор символов в выражении поиска. Например, шаблон 'f[oa]r' соответствует выражениям '...
Команда get_paramНазначение: Получение значения параметров модели или блока. Синтаксис: get_param('obj', 'parameter') Команда возвращает значение параметра parameter, для объекта, полный путь которого задан выраже...
Команда new_systemНазначение: Создание новой модели. Синтаксис: new_system('sys') Команда создает новую модель sys . При этом окно модели не открывается. Для открытия окна следует использовать команду open_system('...
Команда open_systemНазначение: Команда открывает окно модели, подсистемы, окно диалога блока. Синтаксис: open_system('sys') Команда открывает модель sys.mdl . open_system('blk') Команда открывает окно диалога блока...
Команда replace_blockНазначение: Команда выполняет замену одного блока на другой. Синтаксис: replace_block('sys', 'blk1', 'blk2', 'noprompt') Команда заменяет все блоки типа blk1 на блоки blk2 модели sys без запроса н...
Команда save_systemНазначение: Сохранение файла модели. Синтаксис: save_system Сохранение открытой модели под текущим именем. save_system('sys') Сохранение модели sys под текущим именем. save_system('sys', 'newname'...
Команда set_paramНазначение: Установка параметров модели или блока. Синтаксис: set_param('obj', 'parameter1', value1, 'parameter2', value2, ...) Команда выполняет присваивание новых значений value1, value2… параме...
Отладчик Simulink моделейОтладчик Simulink является инструментом для поиска и диагностирования ошибок в моделях Simulink. Он дает возможность точно определить проблемы, выполняя моделирование постепенно с отображением зна...
Графический интерфейс отладчика Simulink моделейЗапуск графического интерфейса отладчика возможен одним из двух способов: С помощью команды меню Tools/Debugger окна Simulink модели. С помощью кнопки панели инструментов окна Simulink модели. Пос...
Панель инструментовОбщий вид панели инструментов показан на рисунке 13.2. Эта панель имеет следующие кнопки: Next Block – Переход к следующему блоку. С помощью данной кнопки осуществляется режим отладки с остановкой...
Панель инструментов 2Display I/O of selected block with executed – Отображать значения входных и выходных сигналов. Данная кнопка позволяет установить режим просмотра входных и выходных сигналов какого-либо не виртуал...
Список контрольных точек Break/Display pointsОкно списка контрольных точек (рисунок 13.4) содержит список блоков, для которых установлены контрольные точки (графа Blocks), а также свойства этих точек указанные с помощью флажков. Пользователь...
Панель задания точек прерывания по условию Break on conditionsПанель (рисунок 13.5) содержит список условий, при наступлении которых расчет должен быть остановлен. Список включает в себя: Zero crossings – Переход сигнала через нулевой уровень при его скачкоо...
Главное окно отладчикаГлавное окно содержит три вкладки: Outputs – Отображение результатов работы в режиме отладки. На данной вкладке (рисунок 13.7) отображается текущее модельное время Tm (или Ti для внутренних шагов)...
Главное окно отладчика 2Execution Order – Порядок выполнения. На вкладке отображается список не виртуальных блоков в порядке их выполнения. Блоки, расположенные в начале списка выполняются раньше, чем блоки, расположенны...
Главное окно отладчика 3Status – Статус отладчика. На данной вкладке (рисунок 13.9) отображается информация о настройках и текущем состоянии отладчика: значение текущего временного шага, количество точек прерывания, инфо...
Интерфейс командной строки отладчика Simulink моделейИнтерфейс командной строки дает пользователю доступ ко всем возможностям отладчика. Запуск отладчика в режиме командной строки возможен с помощью команды, задаваемой в рабочем окне MATLAB: sldebug...
Интерфейс командной строки отладчика Simulink моделей 2break s:b | gcb b нет Вставка точки остановки при входе в блок bafter s:b | gcb ba нет Вставка точки остановки при выходе из блока bshow s:b bs нет Показ указанного с помощью индекса блока clear s...
Интерфейс командной строки отладчика Simulink моделей 3ishow i нет Включение/выключение режима показа информации об интегрирующих блоках emode e нет Вывод информации о текущем режиме моделирования (обычный или ускоренный) probe level {all} | io нет Ус...
Повышение скорости и точности расчетовНа точность и скорость расчета модели в Simulink можно воздействовать многими способами, включая структуру модели и ее параметры. Решающие модули Simulink работают точно и эффективно и с параметра...
Повышение скорости расчетаМалая скорость моделирования может иметь много причин. Среди них можно выделить основные: • Модель содержит блок MATLAB Fcn. При использовании блока MATLAB Fcn в модели Simulink на каждом расчетно...
Повышение скорости расчета 2В блоках Scope параметр Limit data points to last задан значительно меньшим, чем фактическое число расчетных шагов (либо флажок этого параметра снят). В этом случае, при превышении числом шагов зн...
Повышение точности расчетаЧтобы проверить достаточно ли точно выполняется моделирование, следует провести сравнительные расчеты с разными значениями параметра Relative tolerance (относительная погрешность). К примеру, можн...
Обзор набора инструментовSimulink Performance Tools включает четыре приложения, которые расширяют возможности Simulink и существенно увеличивают производительность программы. Использование этих инструментов может значител...
Simulink AcceleratorSimulink Accelerator использует технологию генерации кода и пользовательский компилятор языка C для создания выполняемого файла (dll-файла), который заменяет интерактивный код, обычно используемый...
Simulink Model ProfilingSimulink Model Profiling собирает данные о производительности в процессе выполнения модели и затем генерирует отчет, называемый профилем имитации на основании собранных данных. Этот отчет состоит...
Simulink Model CoverageПри разработке больших моделей, имеющих сложную логику переключения путей по которым распространяются сигналы, пользователь может столкнуться с проблемой тестирования модели. В ходе тестирования п...
Simulink Model Coverage 2На рисунке 15.2 приведена схема модели и отчет, полученный я помощью Simulink Model Coverage. Из рисунка видно, что при данных параметрах схемы выполняется тестирования только 50% модели. Для полн...
Simulink Model DifferencingSimulink Model Differencing сравнивает две Simulink-модели и генерирует графическое изображение различий между ними. На данном изображении выделяются одинаковые блоки моделей, имеющие различные ат...
Система меню обозревателя библиотек программы SimulinkFile (Файл) — Работа с файлами библиотек. Edit (Редактирование) — Добавление блоков и их поиск. View (Вид) — Управление показом элементов интерфейса. Help (Справка) — Вызов справочной системы. Ком...
Система меню обозревателя библиотек программы Simulink 2Find next block... Найти следующий блок с заданным именем. Эту же операцию выполняет и команда Find next в окне задания слова для поиска. Меню View (Вид) Toolbar Вывод/скрытие панели инструментов....
Система меню окна моделиFile (Файл) — Работа с файлами моделей. Edit (Редактирование) — Изменение модели и поиск блоков. View (Вид) — Управление показом элементов интерфейса. Simulation (Моделирование) — Задание настроек...
Система меню окна модели 2Undo Отменить предыдущую команду редактирования. В некоторых случаях команда Undo может уточняться, например, после добавления в блок-диаграмму линии связи между блоками она называется Undo Add Li...
Система меню окна модели 3Signal Properties Вызов окна диалога окна для установки атрибутов сигнала, передаваемого по выбранной линии связи. Окно содержит следующие элементы: • текстовое поле Signal Name (Имя сигнала), пре...
Система меню окна модели 4Disable Link Разорвать связь с библиотекой. Команда позволяет сделать библиотечный блок независимым, не связанным с библиотекой, что дает возможность его редактирования. Данная команда работает дл...
Система меню окна модели 5Statusbar Показать/скрыть строку состояния Model Browser Options Параметры обозревателя модели. Model Browser Вызов обозревателя модели Show Library Links Показывать в окне обозревателя библиотечн...
Система меню окна модели 6Fit system to view Подготовить систему для просмотра. Увеличить масштаб изображения выбранного элемента блок диаграммы. Команда обеспечивает N-кратное увеличение (кратность увеличения зависит от и...
Система меню окна модели 7Меню Format (Форматирование) Font... Выбор шрифта для текстовой информации, отображаемой блоком. Text Alignment Выравнивание текста. Задает способ расположения текста в текстовой области. Flip Nam...
Система меню окна модели 8Port Data Types Тип порта. Рядом с линиями связи отображаются наименования типов данных, установленных для портов, с которыми они соединены. Storage class Класс памяти. Execution order Вывод поряд...
Система меню окна модели 9Help (Справка) Simulink help Справка по работе с программой Simulink. Blocks Справка по выделенному блоку или библиотеке блоков в целом. Shortcuts Справка по управлению программой Simulink с помощ...
